Système de position globale différentielle (DGPS).
Éliminer les erreurs humaines potentielles - marquage précis des trous de souffle.
Semi - méthode de marquage autonome des trous de souffle.
Déploiement facile, fiable et rapide pour accélérer le processus de dynamitage.
Lorsque les coordonnées GPS du trou de souffle ne sont pas disponibles, le tagger DGPS peut enregistrer les positions des trous et les importer dans le logiciel ViewShot 3D.
Capable pour l’intégration dans le futur déploiement et marquage entièrement autonomes (robotiques).

« Le système de dynamitage électronique le plus avancé »
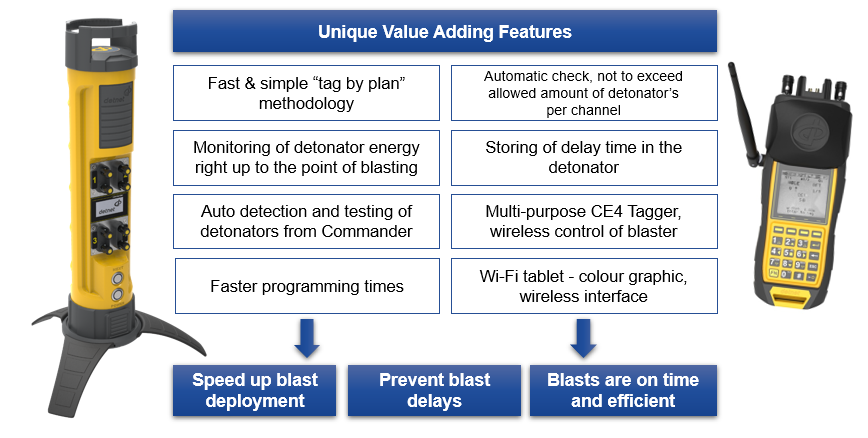
Caractéristiques uniques à valeur ajoutée. Lisez le Slick DGPS Sales pour en savoir plus.
Étude de cas

Défis à relever
Les clients de l’industrie minière rencontrent des problèmes courants lors de l’étiquetage / enregistrement des détonateurs, notamment :
Affectation de retard incorrecte en raison de
- Trous de souffle mal marqués
- Marquage incorrect d’un trou ou d’un retard
- L’absence d’un plan d’explosion
Retards d’explosion
- Difficulté à localiser le bon trou de souffle
- Retards dus au temps pris pour trouver un trou problématique lors de la recherche de défauts et du dépannage sur le banc
Résultats de souffle
- Un timing incorrect aura un impact sur les résultats de souffle en matière de fragmentation, d’efficacité de chargement et de productivité globale
Possibilité
DGPS peut
- Éliminer les erreurs humaines potentielles - marquage précis des trous de souffle.
- Méthode de marquage semi-autonome des trous de souffle.
- Déploiement facile, fiable et rapide pour accélérer le processus de dynamitage
- Lorsque les coordonnées GPS du trou de souffle ne sont pas disponibles, le tagger DGPS peut enregistrer les positions des trous et les importer dans le logiciel ViewShot 3D.
- Capable pour l’intégration dans le futur déploiement et marquage entièrement autonomes (robotiques)
Valeur pour les clients
Accélère le processus de marquage et élimine toute possibilité d’erreur humaine.
Vue d’ensemble de la fonctionnalité
Détection automatique des trous
- Élimine toute possibilité d’erreur humaine pendant le processus de marquage.
- Aucun plan de souffle requis sur le banc.
- Chemin d’accès de balise flexible. Commencez à n’importe quel trou et marquez dans n’importe quelle séquence.
- Aucun retard dû à la séquence de chargement.
Facile à utiliser
- Formation minimale.
Accélère le processus de marquage
- Options de marquage flexibles sans aucune pression sur les boutons.
Recherche de défauts GPS
- Le tagger guidera l’utilisateur vers le trou défectueux.
Contrôle de l’ingénierie et de la gestion
- Fournir plus de contrôle quant à la conception et le marquage du trou réel.
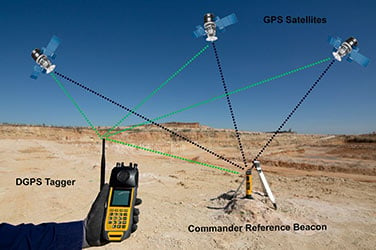
Différence entre le GPS et le DGPS
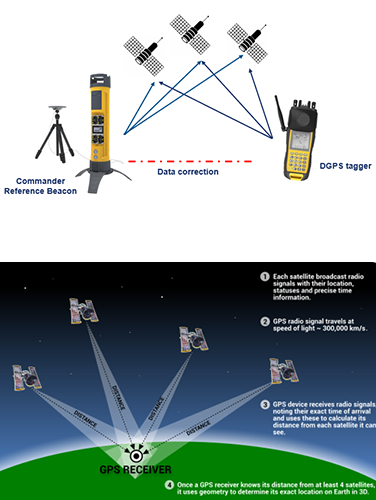
GPS normal :
- Fournit une position d’un objet sur terre à l’aide de signaux générés par des satellites tournant autour de la terre.
- Le GPS utilise des récepteurs autonomes où l’emplacement est directement calculé, mais est également sujet à des erreurs telles que des erreurs d’orbite, des erreurs de trajets multiples et des erreurs d’horloge.
- Fournit une position d’un objet sur terre à l’aide de signaux générés par des satellites tournant autour de la terre.
- Le GPS utilise des récepteurs autonomes où l’emplacement est directement calculé, mais est également sujet à des erreurs telles que des erreurs d’orbite, des erreurs de trajets multiples et des erreurs d’horloge.
En conséquence, le GPS peut obtenir une précision nominale de 10 à 15 mètres.
D’où...
Le GPS n’est PAS adapté à la position précise du trou de souffle.
GPS différentiel :
- L’exactitude du DGPS est obtenue en utilisant un récepteur de référence (commandant CE4) à un emplacement connu étudié qui diffuse des données de correction au Tagger.
- L’exactitude du DGPS est obtenue en utilisant un récepteur de référence (commandant CE4) à un emplacement connu étudié qui diffuse des données de correction au Tagger.
- DGPS est une grande amélioration par rapport au GPS. Il réduit ou élimine la dégradation du signal, ce qui améliore la précision.
- Le système offre une précision inférieure à un mètre pour un marquage et une journalisation précis des trous de souffle.
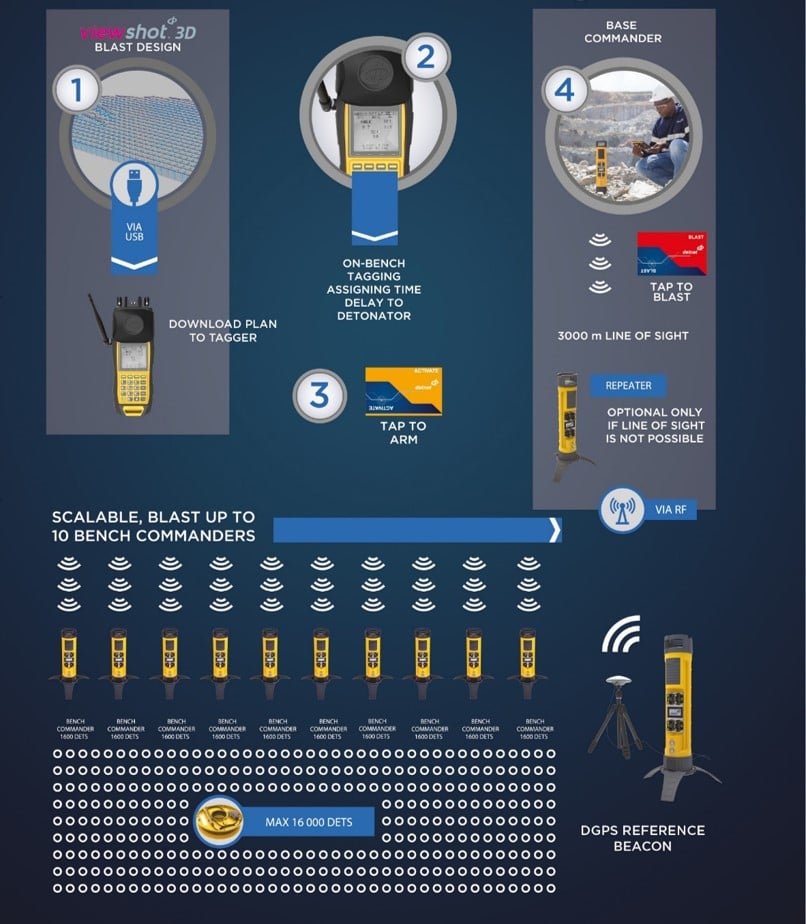
ViewShot 3DLogiciel de conception de souffle
ViewShot 3D est un logiciel de souffle qui facilite la planification, la conception et la simulation du résultat de l’explosion. En utilisant DGPS en « mode plan », les coordonnées GPS des engins de forage sont importées dans ViewShot 3D.
La séquence de synchronisation de la conception du souffle est simulée et optimisée à l’aide des outils de conception de synchronisation pour atteindre les résultats souhaités. Le plan de souffle et la séquence de synchronisation sont ensuite téléchargés sur le tagger DGPS, prêt pour le marquage.
Vue d’ensemble de ViewShot
Développement DGPS
Demandes futures
Les applications futures utilisant DGPS comprennent, un module autonome permettant la capacité DGPS sur d’autres équipements, MPU, engins de forage, etc. ; une liste commune des détonateurs mise à jour en temps réel à mesure que plusieurs utilisateurs ou machines étiquettent les détonateurs ; et l’interface utilisateur centralisée - mise à jour graphique en temps réel sur le processus de déploiement.